
Sabés donde estás parado??? Ubicate...
Sabés donde estás parado??? Ubicate...
Creo no equivocarme si pienso que la mayoría de nosotros, sabemos, hemos oído hablar o incluso poseemos un Receptor GPS (o GPS a secas)…
Lo mismo pienso sobre su funcionamiento, seguramente tenemos una idea del mismo…
De todos modos me pareció una buena idea para un post comentar el funcionamieto básico del GPS, las diferentes clase de familias existentes, el posicionamiento, Trucking y mapas electrónicos vectoriales utilizados…
Espero que sea de su interés también…
INTRODUCCIÓN
Desde tiempos remotos el hombre se preocupó por orientarse correctamente durante sus incursiones por tierra o mar para llegar a su destino sin extraviarse y después regresar al punto de partida. Probablemente el método más antiguo y primitivo que utilizó para no perderse fue el de colocar piedras en el camino o hacer marcas en los árboles, de forma tal que le permitieran regresar después sobre sus pasos.
En los inicios de la navegación de largas travesías, los marinos seguían siempre la línea de la costa para no extraviarse en el mar. Los fenicios fueron los primeros navegantes que se alejaron de las costas adentrándose en el mar abierto con sus embarcaciones. Para no perder el rumbo en las travesías por el Mar Mediterráneo en los viajes que hacían entre Egipto y la isla de Creta se guiaban de día por el Sol y de noche por la Estrella Polar.
A partir del siglo XII se comenzó a utilizar la brújula o compás magnético para orientarse en las travesías por mar. Por otra parte Cristóbal Colón empleó en 1492 un nuevo instrumento inventado en aquella época para ayuda a la navegación: el astrolabio.
Este instrumento estaba compuesto por un disco metálico y un brazo móvil, y le sirvió de ayuda para orientarse durante la travesía que le llevó al descubrimiento de América. Años después surgió el sextante, instrumento de navegación más preciso que el astrolabio, pero que durante mucho tiempo estuvo limitado a determinar solamente la latitud, una de las dos coordenadas necesarias para establecer un punto sobre la Tierra o en el mar.

El astrolabio fue uno de los primeros instrumentos que empleó el hombre en la navegación.

La posibilidad de ubicar en el mar la posición exacta donde se encontraba navegando una embarcación surgió en 1761 con la invención del cronómetro náutico, que no es otra cosa que un reloj de extrema exactitud. Dada su precisión sirvió de complemento al sextante para, en conjunto, poder determinar también la otra coordenada que faltaba, la longitud. La latitud es la coordenada que permite la orientación hacia el hemisferio norte o el sur de la Tierra, mientras que la longitud permite la orientación hacia el este o el oeste.
El cronómetro se sincroniza para que muestre siempre la hora GMT (Greenwich Mean Time) u hora del Meridiano de Greenwich, independientemente de la "hora local" del punto de la Tierra donde se encuentre navegando el medio de transporte, ya sea un barco o un avión.
Cronómetro utilizado para la< navegación.
El sextante y el cronómetro fueron durante dos siglos los únicos instrumentos de navegación con los que se podían determinar esas dos coordenadas sobre un punto cualquiera de la tierra o el mar, tomando como única referencia la hora y la posición del Sol durante el día y de la posición de las estrellas de noche.
En el siglo XX, durante la Segunda Guerra Mundial, se desarrollaron algunos sistemas electrónicos de navegación para conocer las coordenadas y situar la posición de los barcos y aviones que participaban en la contienda bélica. Esos sistemas funcionaban utilizando cierto tipo de receptores de radio instalados a bordo de las naves para captar las señales de radiofrecuencia que emitían determinadas estaciones terrestres. En aquella época dichos sistemas constituyeron un gran avance tecnológico para la navegación, hasta tal punto que incluso algunos de ellos se utilizan todavía.
Los sistemas de navegación más exactos basaban su funcionamiento en la recepción de señales de radio UHF (Ultra High Frecuency – Frecuencia Ultra Alta), las mismas que utilizan los canales de televisión del 14 en adelante, aunque tenían el inconveniente de que no podían cubrir un área muy extensa. Por el contrario, los que cubrían un área mayor basaban su funcionamiento en la recepción de señales de radio A.M. (Amplitud Modulada), las mismas que aún utilizan muchas estaciones comerciales de radiodifusión.
La frecuencia de la A.M. es mucho más baja que la de UHF a lo que hay que añadir el inconveniente de que introducen mucha interferencia en la recepción de las señales.
Los receptores de A.M. tampoco eran muy exactos a la hora de determinar las coordenadas donde se encontraban navegando los barcos. No obstante, la precisión de los datos obtenidos por mediación de esos dispositivos electrónicos de navegación se podía corroborar o contrastar con los cálculos de posición que los navegantes realizaban manualmente con el sextante y el cronómetro.
Posteriormente con los adelantos de la técnica y la ciencia, y el uso extensivo de los satélites en las últimas décadas del siglo XX, se llegó a la conclusión que la única forma posible de cubrir la mayor parte de la superficie terrestre con señales de radio que sirvieran de orientación para la navegación o para situar un punto en cualquier lugar que nos encontrásemos, era situando transmisores en el espacio que sustituyeran o a las estaciones terrestres. De esa forma se crearon las bases de lo que posteriormente sería el sistema GPS (Global Positioning System) o Sistema de posicionamiento global.
LATITUD Y LONGITUD
Para localizar un punto sobre la superficie de la Tierra y trasladarlo o plotearlo en un mapa o carta náutica, es necesario conocer primero las coordenadas donde se encuentra ubicado ese punto, es decir, la latitud y la longitud. Conocer el valor de las coordenadas es imprescindible para poder ubicar la posición de automóviles o coches, barcos, aviones, personas, carreteras, ciudades, puntos de interés, objetos, manchas de peces, fauna animal y hasta una piedra que se encuentre sobre la superficie de la Tierra.
Las líneas de latitud o paralelos están formadas por círculos de diferentes tamaños que parten de la línea del Ecuador y se expanden en dirección a los polos. La línea del Ecuador constituye el círculo de latitud de mayor diámetro de la Tierra y la divide en dos mitades: hemisferio Norte y hemisferio Sur. La línea del Ecuador se identifica en las cartas náuticas y los mapas como latitud “0” grado (0º) y el nombre lo recibe porque atraviesa la ciudad de Quito, capital de la República del Ecuador, situada en el continente sudamericano.

A partir del Ecuador se extienden, hacia el norte y el sur, las denominadas líneas de latitud. El diámetro de los círculos que forman esas líneas se van empequeñeciendo a medida que se acercan a los polos hasta llegar a convertirse solamente en un punto en ambos polos, donde adquiere un valor de 90 grados (90º). El Ecuador, como cualquier otro círculo, se puede dividir (y de hecho se divide) en 360 grados (360º), por lo cual pueden atravesarlo 360 líneas de longitud o meridianos.
Estos meridianos se extienden desde el polo norte hasta el polo sur de forma paralela al eje de rotación de la Tierra. Como longitud “0” grado (0º) se designó el meridiano que pasa por el Real Observatorio Astronómico de Greenwich, cerca de la ciudad de Londres, en Inglaterra. Esa línea de longitud se conoce también por el nombre de meridiano de Greenwich a partir del cual se rigen los husos horarios que determinan la hora en todos los puntos de la Tierra.
Hasta hace un tiempo atrás, en navegación siempre se tomaba como referencia para todas las operaciones la hora GMT (Greenwich Mean Time) u hora del meridiano de Greenwich. Este meridiano divide la Tierra en otras dos mitades a partir de los polos, tomando como referencia su eje de rotación: hemisferio occidental hacia el oeste y hemisferio oriental hacia el este. De hecho las longitudes se miden en las dos direcciones correspondientes a cada hemisferio partiendo del meridiano 0º de Greenwich. La hora GMT se define por la posición del Sol y las estrellas, pero con la aparición de los relojes atómicos, como los que emplean los satélites GPS, se ha establecido la hora UTC o Tiempo Universal Coordinado en sustitución de la hora GMT. Este cambio se debe a que la rotación de la Tierra sufre variaciones retrasándose la hora con respecto al tiempo atómico. En contraposición, la hora UTC es de una alta precisión, tal como la requieren los navegadores GPS para poder localizar con exactitud un punto cualquiera de la Tierra.
En dirección oeste partiendo de Greenwich, el hemisferio occidental comprende parte de Europa y de África, América y algunas islas hasta llegar a la línea de longitud o meridiano 180º situada en el Océano Pacífico. En sentido contrario, en dirección al este, el hemisferio oriental comprende la mayor parte de Europa y África, Asia, y la mayoría de las islas del Pacífico hasta llegar de nuevo a la misma línea de longitud o meridiano 180º. Si sumamos 180º hacia el oeste más 180º hacia el este obtendremos como resultado los 360º grados correspondientes a la circunferencia del Ecuador. El meridiano 180º se conoce también por el nombre de “línea internacional de cambio de la fecha”, pues hacia el oeste corresponde a un nuevo día y hacia el este corresponde al día anterior.
Tanto las líneas longitud como las de latitud, además de dividirse en grados, se subdividen también en minutos y segundos. Por tanto podemos localizar un punto situado exactamente en las coordenadas 40º de latitud norte y 3º de longitud este y si nos desplazamos unos kilómetros, el punto de localización podría ser 38º 40´ 20´´ (38 grados, 40 minutos, 20 segundos) de latitud norte y 3º 30´ 59´´ (3 grados, 30 minutos, 59 segundos) de longitud este. Si la medida anterior se repitieran en el hemisferio opuesto, por ejemplo en los 40º de latitud sur y 3º de longitud oeste, ésta sería una ubicación completamente distinta y muy alejada de la primera.
CÓMO CONOCER DÓNDE ESTAMOS SITUADOS
El principio matemático de la triangulación permite establecer el punto sobre la Tierra sobre el cual estamos situados. Para ello será necesario conocer la distancia que nos separa de tres puntos de ubicación conocida y trazar tres círculos, cuyos radios (r) se corresponden con esas distancias.
Supongamos que nos encontramos situados en un punto desconocido, cerca de otro al que llamaremos “A”, cuyo radio es (r); al doble de esa distancia (2r) está situado el punto “B” y al triple de la distancia (3r) el punto “C”.

Principio matemático de la triangulación
Si trazamos sobre un mapa de la zona tres circunferencias, tomando como centro los puntos A, B y C y como valor de sus radios las distancias a escala reducida que nos separa del centro de cada círculo, el punto donde se cortan las circunferencias será el lugar donde nos encontramos situados.
Por supuesto, esta explicación sólo constituye una demostración matemática del principio de la triangulación, porque no sería lógico conocer dónde están situados esos tres puntos de referencia e incluso la distancia que nos separa de ellos y no conocer realmente el punto donde nos encontramos situados.
Sin embargo, si contáramos con un dispositivo capaz de calcular por sí mismo la distancia que nos separa de A, B y C, entonces sí sería posible ubicar nuestra posición. Es en ese principio en el que se basa, precisamente, el funcionamiento de los receptores GPS.
SISTEMAS DE POSICIONAMIENTO ANTERIORES AL GPS
Durante las primeras décadas del siglo XX, el descubrimiento de las ondas de radio y su aplicación como ayuda a la navegación aumentó la fiabilidad de los cronómetros. Gracias a la radiodifusión de señales horarias los relojes de los barcos se ajustaban periódicamente a una hora exacta tomando como referencia la hora GMT (Greenwich Meridian Time) u hora del meridiano de Greenwich.
Antes de existir el sistema GPS se utilizaron otros sistemas de navegación y posicionamiento basados en la recepción de señales de radio, que aplicaban el principio matemático de la triangulación. Estos sistemas podían determinar la posición de un barco o un avión sin necesidad de conocer la distancia que los separaba de otros puntos de referencia.
Durante la Segunda Guerra Mundial se desarrollaron el radiogoniómetro, el radiofaro direccional, las radio balizas y el loran, todos ellos basados en la transmisión o recepción de ondas de radio. El radiogoniómetro fue el primero que se utilizó de forma generalizada como ayuda a la navegación.
El radiogoniómetro más elemental consiste en un receptor convencional de ondas de radio, dotado con una antena orientable, que permite no sólo captar las señales de radio, sino también determinar la dirección del lugar de donde proceden. La antena se encuentra montada en un eje vertical y colocada sobre la parte superior de su cuerpo o a determinada altura en el exterior . La colocación de la antena en el eje permite hacerla rotar hacia un lado o hacia el otro para poder captar lo mejor posible las señales provenientes de las estaciones terrestres. Por propia experiencia todos conocemos que las antenas de los receptores de radio portátiles de F.M. (Frecuencia Modulada) y la de los televisores hay que moverlas y orientarlas hasta lograr establecer una buena recepción del sonido y la imagen. Con la antena del radiogoniómetro sucede algo similar.

Radiogoniómetro
Cuando queremos sintonizar una estación comercial en el radiorreceptor de nuestra casa, la podemos localizar y sintonizar buscándola por la frecuencia en que transmite o en su defecto por su nombre de identificación. Para ello sólo será necesario mover el cursor del dial hasta lograr encontrarla y sintonizarla lo más fielmente posible. Si conocemos la frecuencia en que transmite una estación de radio o, en su defecto, el nombre comercial de identificación, si nos lo proponemos podemos averiguar en que país o ciudad se origina la transmisión e incluso hasta la calle o lugar exacto donde se encuentran situados los estudios o la antena transmisora.
Para localizar en el radiogoniómetro una señal audible procedente de una estación terrestre de ayuda a la navegación sintonizamos en el dial su frecuencia y acto seguido hacemos girar la antena hasta que la señal se reciba lo más fuertemente posible. En ese momento la antena se encontrará situada en posición perpendicular a la dirección de donde procede la señal. Para conocer ahora dónde se encuentra situada la estación transmisora es necesario consultar una guía donde se encuentran relacionadas las posiciones de todas las estaciones terrestres de ayuda a la navegación de acuerdo con la frecuencia en kilohertz (kHz.) o megahertz (MHz.) en que transmite sus señales.
Una vez que esté bien sintonizada la señal e identificado el punto donde se encuentra ubicada la estación que la transmite, se hace girar de nuevo la antena hasta que la señal sea imperceptible. En esa nueva posición la antena receptora del radiogoniómetro apuntará directamente hacia el lugar de procedencia de la señal. A continuación se determina el valor del ángulo existente entre la señal que nos llega y las coordenadas donde se encuentra situada la estación y trasladamos ese ángulo al mapa o carta náutica con la ayuda de reglas paralelas. Esta operación es necesario realizarla por lo menos tres veces localizando tres estaciones costeras diferentes.
LOCALIZACIÓN DE UN PUNTO POR EL MÉTODO DE TRIANGULACIÓN
Supongamos que nos encontramos navegando en un barco en medio del mar y tenemos necesidad de situar nuestra posición en el mapa o carta náutica por medio del radiogoniómetro.
Localizamos y sintonizamos, primeramente, la frecuencia de una estación tratando de percibir un pitido lo más agudo y claro posible, y a continuación hacemos girar la antena hasta que el pitido desaparezca. La posición que toma la antena indicará hacia el lugar de donde procede la señal. Buscamos en una guía de estaciones costeras de ayuda a la navegación las coordenadas correspondientes a la estación cuya frecuencia tenemos sintonizada y verificamos en la esfera graduada del radiogonéometro el ángulo existente entre la señal y el barco.
Con una regla paralela para cartografía (como la que se puede ver en la ilustración animada de la derecha), colocada sobre la “rosa de los vientos” de una carta náutica podemos situar o plotear el ángulo correspondiente a la lectura que hemos obtenido en el radiogoniómetro. A continuación extendemos la regla de forma tal que podamos trazar una línea que corte las coordenadas o punto donde se encuentra ubicada la estación que transmite la señal.

Supongamos que en nuestro ejemplo esas coordenadas se encuentran en LN 30º, LO 17º, es decir, en los 30º de latitud norte y 17º de longitud oeste, punto que identificaremos como (A). Esa misma operación la repetimos con otra señal procedente del punto (B), situado en las coordenadas LN 43º 40´ y a continuación con el punto (C) situado en LN 38º, LO 9º.

Una vez trazada las tres líneas con la ayuda de las reglas paralelas, el punto donde éstas se cortan señalará las coordenadas sobre las cuales se encuentra navegando en esos momentos nuestro barco. En este ejemplo ese punto estará ubicado en LN 37º, LO 15º, en medio del Océano Atlántico, muy cerca de Gibraltar a la entrada del Mar Mediterráneo.
De esta forma hemos establecido nuestra posición en el mar empleando el método de triangulación, en este caso específico sin conocer en ningún momento la distancia que nos separaba de cada una de las estaciones de radio terrestres.
El radiogoniómetro también se puede utilizar para rastrear y localizar en una ciudad una antena de radio desde donde se origina, por ejemplo, una transmisión clandestina. Para ello sólo será necesario desplazarse en un vehículo con el radiogoniómetro y determinar desde dos o tres posiciones diferentes la dirección de procedencia de la señal y a continuación trasladarla o plotearla en una carta o mapa de una ciudad o un descampado. El punto donde se cortan las líneas que se trazan en el mapa será el lugar exacto desde el cual se origina la transmisión.
ANTECEDENTES DEL SISTEMA GPS

Satélite Vanguard. Foto NASA
El lanzamiento del satélite espacial estadounidense Vanguard en 1959 puso de manifiesto que la transmisión de señales de radio desde el espacio podría servir para orientarnos y situarnos en la superficie terrestre o, a la inversa, localizar un punto cualquiera en la Tierra.
Los sistemas anteriores de posicionamiento que empleaban estaciones terrestres de A.M. (Amplitud Modulada) cubrían un área mayor que los de UHF (Frecuencias ultracortas), pero no podían determinar con exactitud una posición debido a las interferencias atmosféricas que afectan a las señales de radio de amplitud modulada y a la propia curvatura de la Tierra que desvía las ondas
Por tanto, la única forma de solucionar este problema era colocando transmisores de radio en el espacio cósmico que emitieran constantemente señales codificadas en dirección a la Tierra. De hecho esas señales cubrirían un área mucho mayor que las de A.M., sin introducir muchas interferencias en su recorrido.
Sin embargo, no fue hasta 1993 que el Departamento de Defensa de los Estados Unidos de América, basado en la experiencia recogida del satélite Vanguard (en un principio para uso exclusivamente militar) puso en funcionamiento un sistema de localización por satélite conocido por las siglas en inglés GPS (Global Positioning System – Sistema de Posicionamiento Global).
En sus inicios el propio Departamento de Defensa programó errores de cálculo codificados en las transmisiones de los satélites GPS para limitarlo solamente a la actividad militar que sí contaba con decodificadores para interpretar correctamente las señales, pero a partir de mayo de 2000 esta práctica quedó cancelada y hoy en día el sistema GPS se utiliza ampliamente en muchas actividades de la vida civil, aunque no está exento de ser reprogramado de nuevo en caso de cualquier conflicto bélico.
Este sistema permite conocer la posición y la altura a la nos encontramos situados en cualquier punto de la Tierra en todo momento, ya sea que estemos situados en un punto fijo sin desplazarnos, e incluso en movimiento, tanto de día como de noche.
El sistema GPS permite rastrear también, en tiempo real, la ubicación de una persona, animal, vehículo, etc., desde cualquier sitio y prestar auxilio si fuera necesario, con la condición que estén equipados con un dispositivo que pueda emitir algún tipo de señal, ya sea de radio o telefónica, que permita su localización.
La primera prueba exitosa del sistema GPS desde el punto de vista práctico como instrumento de ayuda a la navegación, la realizó el trasbordador espacial Discovery en el propio año que se puso en funcionamiento el sistema. Actualmente los satélites GPS pertenecen a una segunda generación denominada Block II.
COMPOSICIÓN DEL SISTEMA GPS
El sistema GPS consta de tres partes principales: los satélites, los receptores y el control terrestre.
El sistema se compone de 24 satélites distribuidos en seis órbitas polares diferentes, situadas a 2 169 kilómetros (11 000 millas) de distancia de la Tierra. Cada satélite la circunvala dos veces cada 24 hora. Por encima del horizonte siempre están “visibles” para los receptores GPS por lo menos 4 satélites, de forma tal que puedan operar correctamente desde cualquier punto de la Tierra donde se encuentren situados.
CONSTELACIÓN SATÉLITES GPS

Por norma general y para mayor exactitud del sistema, dentro del campo visual de cualquier receptor GPS siempre hay por lo menos 8 satélites presentes. Cada uno de esos satélites mide 5 m de largo y pesa 860 kg . La energía eléctrica que requieren para su funcionamiento la adquieren a partir de dos paneles compuestos de celdas solares adosadas a sus costados. Están equipados con un transmisor de señales codificadas de alta frecuencia, un sistema de computación y un reloj atómico de cesio, tan exacto que solamente se atrasa un segundo cada 30 mil años.

La posición que ocupan los satélites en sus respectivas órbitas facilita que el receptor GPS reciba, de forma constante y simultánea, las señales de por lo menos 6 u 8 de ellos, independientemente del sitio donde nos encontremos situado. Mientras más señales capte el receptor GPS, más precisión tendrá para determinar las coordenadas donde se encuentra situado.
PRINCIPIO DE FUNCIONAMIENTO DEL GPS
Los receptores GPS más sencillos están preparados para determinar con un margen mínimo de error la latitud, longitud y altura desde cualquier punto de la tierra donde nos encontremos situados. Otros más completos muestran también el punto donde hemos estado e incluso trazan de forma visual sobre un mapa la trayectoria seguida o la que vamos siguiendo en esos momentos. Esta es una capacidad que no poseían los dispositivos de posicionamiento anteriores a la existencia de los receptores GPS.
El funcionamiento del sistema GPS se basa también, al igual que los sistemas electrónicos antiguos de navegación, en el principio matemático de la triangulación. Por tanto, para calcular la posición de un punto será necesario que el receptor GPS determine con exactitud la distancia que lo separa de los satélites.
Cálculo de la distancia entre el receptor y los satélites.
Como se explicó anteriormente, con la aplicación del principio matemático de la triangulación podemos conocer el punto o lugar donde nos encontramos situados, e incluso rastrear y ubicar el origen de una transmisión por ondas de radio. El sistema GPS utiliza el mismo principio, pero en lugar de emplear círculos o líneas rectas crea esferas virtuales o imaginarias para lograr el mismo objetivo.
Desde el mismo momento que el receptor GPS detecta una señal de radiofrecuencia transmitida por un satélite desde su órbita, se genera una esfera virtual o imaginaria que envuelve al satélite. El propio satélite actuará como centro de la esfera cuya superficie se extenderá hasta el punto o lugar donde se encuentre situada la antena del receptor; por tanto, el radio de la esfera será igual a la distancia que separa al satélite del receptor. A partir de ese instante el receptor GPS medirá las distancias que lo separan como mínimo de dos satélites más. Para ello tendrá que calcular el tiempo que demora cada señal en viajar desde los satélites hasta el punto donde éste se encuentra situado y realizar los correspondientes cálculos matemáticos.

Cuando tiramos una piedra al agua se generan una serie de ondas concéntricas, que se amplían a partir del punto donde ésta cae, de forma similar a como lo hacen las ondas de radiofrecuencia.
Todas las señales de radiofrecuencias están formadas por ondas electromagnéticas que se desplazan por el espacio de forma concéntrica a partir de la antena transmisora, de forma similar a como lo hacen las ondas que se generan en la superficie del agua cuando tiramos una piedra. Debido a esa propiedad las señales de radio se pueden captar desde cualquier punto situado alrededor de una antena transmisora. Las ondas de radio viajan a la velocidad de la luz, es decir, 300 mil kilómetros por segundo (186 mil millas por segundo) medida en el vacío, por lo que es posible calcular la distancia existente entre un transmisor y un receptor si se conoce el tiempo que demora la señal en viajar desde un punto hasta el otro.
Para medir el momento a partir del cual el satélite emite la señal y el receptor GPS la recibe, es necesario que tanto el reloj del satélite como el del receptor estén perfectamente sincronizados. El satélite utiliza un reloj atómico de cesio, extremadamente exacto, pero el receptor GPS posee uno normal de cuarzo, no tan preciso. Para sincronizar con exactitud el reloj del receptor GPS, el satélite emite cada cierto tiempo una señal digital o patrón de control junto con la señal de radiofrecuencia. Esa señal de control llega siempre al receptor GPS con más retraso que la señal normal de radiofrecuencia. El retraso entre ambas señales será igual al tiempo que demora la señal de radiofrecuencia en viajar del satélite al receptor GPS.
La distancia existente entre cada satélite y el receptor GPS la calcula el propio receptor realizando diferentes operaciones matemáticas. Para hacer este cálculo el receptor GPS multiplica el tiempo de retraso de la señal de control por el valor de la velocidad de la luz. Si la señal ha viajado en línea recta, sin que la haya afectado ninguna interferencia por el camino, el resultado matemático será la distancia exacta que separa al receptor del satélite.
Las ondas de radio que recorren la Tierra lógicamente no viajan por el vacío sino que se desplazan a través de la masa gaseosa que compone la atmósfera; por tanto, su velocidad no será exactamente igual a la de la luz, sino un poco más lenta. Existen también otros factores que pueden influir también algo en el desplazamiento de la señal, como son las condiciones atmosféricas locales, el ángulo existente entre el satélite y el receptor GPS, etc. Para corregir los efectos de todas esas variables, el receptor se sirve de complejos modelos matemáticos que guarda en su memoria. Los resultados de los cálculos los complementa después con la información adicional que recibe también del satélite, lo que permite mostrar la posición con mayor exactitud.
CÓMO UBICA LA POSICIÓN EL RECEPTOR GPS
Para ubicar la posición exacta donde nos encontramos situados, el receptor GPS tiene que localizar por lo menos 3 satélites que le sirvan de puntos de referencia. En realidad eso no constituye ningún problema porque normalmente siempre hay 8 satélites dentro del “campo visual” de cualquier receptor GPS. Para determinar el lugar exacto de la órbita donde deben encontrarse los satélites en un momento dado, el receptor tiene en su memoria un almanaque electrónico que contiene esos datos.
Tanto los receptores GPS de mano, como los instalados en vehículos con antena exterior fija, necesitan abarcar el campo visual de los satélites. Generalmente esos dispositivos no funcionan bajo techo ni debajo de las copas de los árboles, por lo que para que trabajen con precisión hay que situarlos en el exterior, preferiblemente donde no existan obstáculos que impidan la visibilidad y reduzcan su capacidad de captar las señales que envían a la Tierra los satélites.
Animación de la triangulación esférica del GPS
El principio de funcionamiento de los receptores GPS es el siguiente:
Primero: cuando el receptor detecta el primer satélite se genera una esfera virtual o imaginaria, cuyo centro es el propio satélite. El radio de la esfera, es decir, la distancia que existe desde su centro hasta la superficie, será la misma que separa al satélite del receptor. Éste último asume entonces que se encuentra situado en un punto cualquiera de la superficie de la esfera, que aún no puede precisar.
Segundo: al calcular la distancia hasta un segundo satélite, se genera otra esfera virtual. La esfera anteriormente creada se superpone a esta otra y se crea un anillo imaginario que pasa por los dos puntos donde se interceptan ambas esferas. En ese instante ya el receptor reconoce que sólo se puede encontrar situado en uno de ellos.
Tercero: el receptor calcula la distancia a un tercer satélite y se genera una tercera esfera virtual. Esa esfera se corta con un extremo del anillo anteriormente creado en un punto en el espacio y con el otro extremo en la superficie de la Tierra. El receptor discrimina como ubicación el punto situado en el espacio utilizando sus recursos matemáticos de posicionamiento y toma como posición correcta el punto situado en la Tierra.
Cuarto: una vez que el receptor ejecuta los tres pasos anteriores ya puede mostrar en su pantalla los valores correspondientes a las coordenadas de su posición, es decir, la latitud y la longitud.
Quinto: para detectar también la altura a la que se encuentra situado el receptor GPS sobre el nivel del mar, tendrá que medir adicionalmente la distancia que lo separa de un cuarto satélite y generar otra esfera virtual que permitirá determinar esa medición.
Si por cualquier motivo el receptor falla y no realiza las mediciones de distancias hasta los satélites de forma correcta, las esferas no se interceptan y en ese caso no podrá determinar, ni la posición, ni la altura.
EL RECEPTOR GPS - TIPOS DE RECEPTORES GPS
Los receptores GPS detectan, decodifican y procesan las señales que reciben de los satélites para determinar el punto donde se encuentran situados y son de dos tipos: portátiles y fijos. Los portátiles pueden ser tan pequeños como algunos teléfonos celulares o móviles. Los fijos son los que se instalan en automóviles o coches, embarcaciones, aviones, trenes, submarinos o cualquier otro tipo de vehículo.
La mayoría de los receptores GPS actuales tienen la posibilidad, como valor añadido, de guardar en memoria la información digitalizada de mapas, planos de calles de ciudades, red de carreteras y otras prestaciones que puede mostrar gráficamente en su pantalla con un alto nivel de detalle. Una vez que conocemos las coordenadas de nuestra posición es posible ampliar o reducir la escala de los mapas para podernos orientar mejor o seleccionar el camino más corto hasta nuestro destino.
Si usted es de las personas que se desorientan y extravían con facilidad cuando intenta llegar hasta un sitio cualquiera que no conoce, con un receptor GPS le será prácticamente imposible perderse aunque se encuentre en medio de una gran ciudad desconocida, una carretera solitaria, un descampado, el océano, el desierto o volando en un avión particular. En todo momento el receptor GPS muestra las coordenadas del punto donde éste se encuentra situado durante todo el tiempo que se encuentre funcionando y, además, bajo cualquier tipo de condiciones climatológicas que le rodee.
Por otra parte, ya no es necesario cargar con un montón de mapas a la hora de realizar un viaje, pues si el vehículo en que vamos a viajar lleva instalado un receptor GPS, se podrá seguir en su pantalla el trazado del recorrido que va siguiendo, la velocidad de desplazamiento y el tiempo que demora o demorará en trasladarse de un punto a otro.
Para que el receptor GPS realice todas esas operaciones sólo será necesario introducirle de antemano las coordenadas de los diferentes puntos de la ruta que se pretende seguir. Los receptores fijos que están dotados con esta posibilidad, así como algunos portátiles, permiten introducir en su memoria las coordenadas de diferentes puntos de interés. De esa forma se puede organizar el trazado completo de una ruta, la que una vez introducida en la memora se podrá reutilizar otra vez en cualquier momento que se necesite. Así sólo será necesario indicarle al receptor GPS el trayecto que queremos recorrer y éste se encargará de guiarnos, mostrándonos las vías más idóneas, así como las distancias existentes entre un punto y otro a medida que nos desplazamos por la carretera.
Actualmente se fabrican receptores GPS que muestran directamente mapas de un área determinada. Otros aceptan también memorias conteniendo mapas detallados, incluso de ciudades, que le indican al usuario la forma de encontrar una dirección mientras conduce un vehículo.
MODOS Y USOS DEL GPS/GIS
• Localización simple: en los comienzos y en los dispositivos más sencillos la única información mostrada por el dispositivo son las Coordenadas Cartesianas (Longitud y Latitud) y en elgunos caso la altura relativa al Nivel del Mar.
• Localización y Navegación básica: el ldispositivo permite generar un Tracking o ruta del desplazamiento a través de marcas periódicas denominadas Waypoints. Puede ser por tránsito (registro) o precargado. Generalmente permiten el Return o recorrido inverso con guía asistida.
• Navegación avanzada: se indica el Destino deseado y el dispositivo indica el camino óptimo acorde al criterio solicitado (más corto, más rápido, con menor diferencia de alturas en trekking, etc…).
• Geoposicionamiento directo: simplemente muestra la localización simple referenciada en un Mapa electrónico con o sin Tracking.
• Georeferencia inteligente: muestra puntos de interés a elección del usuario y en un radio especificado (turismo, restaurantes, hospitales, radares ruteros, estaciones de tren, etc)
• Navegación específica: similar a la avanzada pero con un fin deterrminado, cosecha, fumigación, relevamiento de terrenos, recorrido de grandes extensiones.
• Tracking AVL: Automatic Vehicle Localization, se utiliza para localizar vehículos en general o como medida de seguridad ante robo o situación de riesgo, generalmente se complementa con corte de energía o combustible, botones de pánico, cámaras de cabina, alarmas sonoras, micrófonos de cabina…
• Tracking de Flota AVL: recorrido, velocidad promedio, consumo de combustible, horarios de salida o arribo, kilometraje para mantenimiento, cerca electrónica (recorrido preestablecido o áreas excluídas).
• Mapas electrónicos: si bien hay muchos protocolos y tipos de mapas, voy a citar únicamente dos por su representatividad:
o Mapa Satelital (Tipo Google Earth) el cual parte de una foto a la cual se la georeferencia por las coordenadas de las fotos que la componen.
o Mapa Vectorial (ESRI = Enviromental Systems Research Institute) los cuales son mas similares a los mapas comunes en papel pero en medio electrónico einformático.
• Otros sistemas de localización: a veces se confunde la localización real del GPS con otras de menor exactitud y tecnología como Triangulación por señal celular, radiobaliza (señal que se dispara y se debe ubicar por rastreo con vehículos receptores).
MODELO DE LOCALIZACIÓN GPS PERSONAL

MODELS GPS PORTÁTIL DE MANO
MODELOS GPS PORTÁTILES PARA VEHÍCULOS


LA NUEVA GENERACIÓN CELULAR CON GPS REAL INCORPORADO

ANTENA GPS PARA AGREGARLE A UNA NOTEBOOK


GEOREFERENCIADOR PARA CÁMARAS DIGITALES

EL CHIP GPS

ANTENAS GPS

RELOJ GPS

DISPOSITIVO SISTEMA AVL
ARQUITECTURA DEL SISTEMA
AVL

AVL FLOTA

CENTRAL DE MONITOREO

EJEMPLO DE COBERTURA DE MAPAS ELECTRÓNICOS / SATELITALES

EJEMPLO DE TRACKING GPS SOBRE MAPA SATELITAL

EJEMPLO DE MAPA ELECTRÓNICO VECTORIAL REFERENCIABLE

GEOREFERENCIA GIS SOBRE MAPA SATELITAL
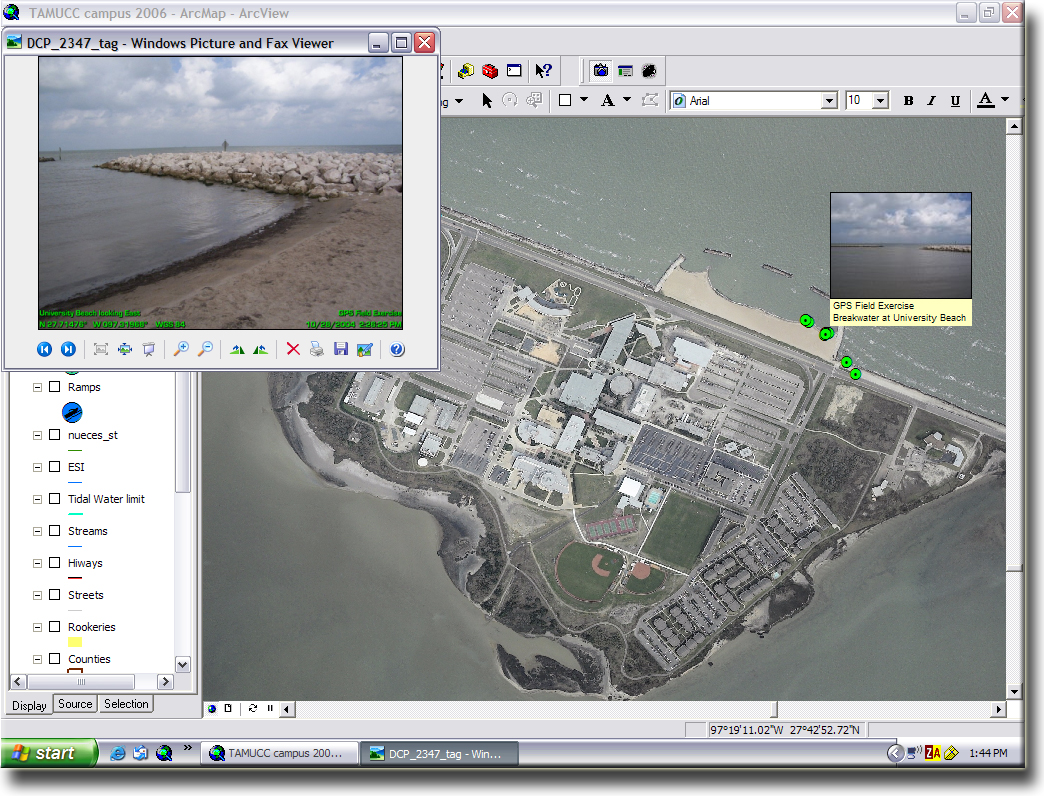
ASOCIANDO FOTOS A PUNTOS GEOGRÁFICOS

GIS, ASOCIANDO INFORMACIÓN A PUNTOS GEOGRÁFICOS

UN CASO ESPECIAL - GPS DIFERENCIAL
El GPS Diferencial introduce una mayor exactitud en el sistema. Ese tipo de receptor, además de recibir y procesar la información de los satélites, recibe y procesa, simultáneamente, otra información adicional procedente de una estación terrestre situada en un lugar cercano y reconocido por el receptor. Esta información complementaria permite corregir las inexactitudes que se puedan introducir en las señales que el receptor recibe de los satélites. En este caso, la estación terrestre transmite al receptor GPS los ajustes que son necesarios realizar en todo momento, éste los contrasta con su propia información y realiza las correcciones mostrando en su pantalla los datos correctos con una gran exactitud.
El margen de error de un receptor GPS normal puede estar entre los 60 y los 100 metros de diferencia con la posición que muestra en su pantalla. Para un desplazamiento normal por tierra 100 metros de diferencia no debe ocasionar ningún problema, pero para realizar la maniobra de aterrizaje de un avión, sobre todo si las condiciones de visibilidad son bajas, puede llegar a convertirse en un desastre. Sin embargo, el GPS Diferencial reduce el margen de error a menos de un metro de diferencia con la posición indicada.
El GPS que se emplea en los aviones es de tipo "diferencial". En la foto se puede apreciar un monitor de cabina de pasajeros de un Airbus 340< mostrando la aproximación a la costa de Portugal, frente a Oporto, cuando se encontraba todavía volando sobre el Océano Atlántico.
El único inconveniente del GPS Diferencial es que la señal que emite la estación terrestre cubre solamente un radio aproximado de unos 200 kilómetros. No obstante ese rango es más que suficiente para realizar una maniobra de aproximación y aterrizaje de un avión a un aeropuerto.
Existen también receptores GPS mucho más sofisticados que funcionan recibiendo múltiples señales de radiofrecuencia. En esos dispositivos el margen de error no sobrepasa los 25 centímetros.
OTROS SISTEMAS ALTERNATIVOS DE POSICIONAMIENTO
Además del sistema de posicionamiento global GPS, existe una segunda alternativa que hace años se encuentra en funcionamiento denominada GLONASS y una tercera en proyecto conocida como Galileo.
GLONASS
La segunda alternativa al Sistema de posicionamiento global GPS estadounidense la constituye el Sistema de satélites de navegación global GLONASS (GLObal NAvigation Satellite System) de administración rusa, cuyas funciones son similares a las del GPS, pero con marcadas diferencias en su forma de operar.
Al igual que el sistema GPS, el GLONASS tiene aplicación tanto en el campo militar como en el civil, aunque en este último su uso es bastante limitado. El control de este sistema lo ejerce el gobierno de la Federación Rusa por mediación de las Fuerzas Espaciales.
El primer satélite del sistema GLONASS fue lanzado al espacio y puesto en órbita circunterrestre el 12 de octubre de 1982 y el sistema completo comenzó a operar oficialmente el 24 de septiembre de 1993. Este sistema se compone de 24 satélites (21 activos y 3 de reserva), distribuidos en tres planos orbitales con una separación entre sí de 120º. Cada satélite gira en una órbita circular a 19 mil 100 km de altura de la Tierra y da una vuelta completa a la órbita cada 11 horas y 15 minutos, aproximadamente.
Los 24 satélites del sistema GLONASS están distribuidos en sus respectivas órbitas de forma tal que siempre existen entre 4 ó 5 de ellos a la vista de los receptores, cubriendo el 97% de toda la superficie terrestre.
Existen actualmente receptores duales que trabajan tanto con el sistema GPS como con el sistema GLONASS.
GALILEO
La tercera alternativa de posicionamiento global es el sistema Galileo, controlado por la Unión Europea y que se espera entre en explotación en el año 2008. Este sistema, actualmente en fase de desarrollo por la Agencia Espacial Europea, rinde honor con su nombre al famoso físico y astrónomo italiano Galileo Galilei (1564-1642).
El principio de funcionamiento del sistema europeo será idéntico al GPS norteamericano. Estará formado por 30 satélites geoestacionarios distribuidos en tres órbitas circunterrestres situadas aproximadamente a 24 mil kilómetros de altura sobre la Tierra. De ese total de satélites en órbita se encontrarán siempre operativos 27, mientras los 3 restantes se mantendrán en reserva.
Una diferencia sustancial entre el sistema Galileo, comparado con el GPS y el GLONASS, es que su origen es completamente civil y no estará controlado por un solo país, sino por todos los países que integran la Unión Europea.
La Agencia Espacial Europea prevé que el sistema Galileo sea mucho más preciso que el GPS teniendo en cuenta la tecnología de los satélites de nueva generación y los sistemas de control que se utilizarán desde Tierra. De hecho el margen de error se calcula que sea solamente de 10 metros, prácticamente la décima parte del GPS. Además, gracias a la amplitud territorial que abarcará y la mayor precisión de las señales de los satélites del sistema Galileo, éstas podrán ser captadas también en algunas latitudes remotas hasta donde no llegan todavía las señales del sistema GPS.
Fuente:
http://www.google.com.ar/imagenes
http://www.comofunciona.com

Y PRÓXIMAMENTE...




3 Comentarios